
Teleoperation
Remote control link between a miniature arm and a UR5e manipulator.
Selected Work
Projects focused on reliable hardware, precise control, and intelligent automation for real-world constraints.

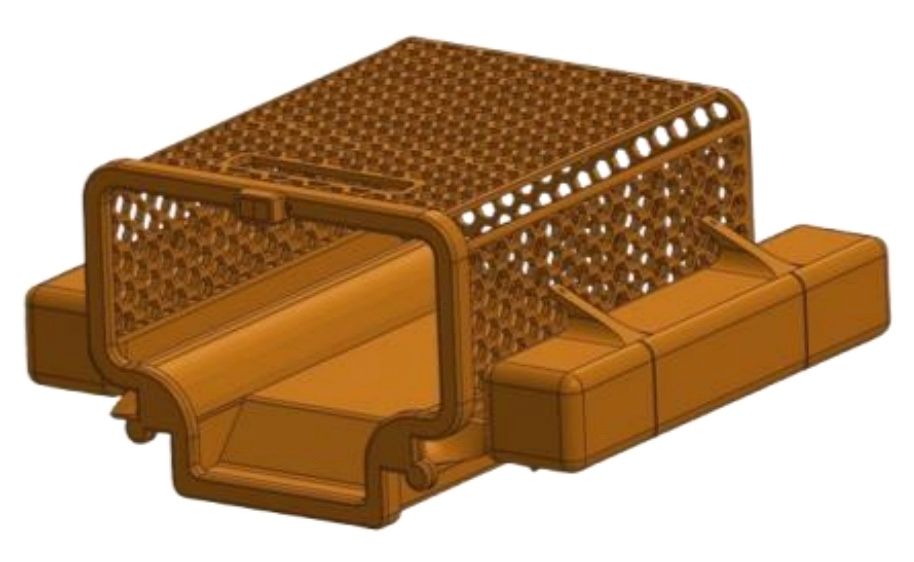
Mechanical prosthesis design for fast-grip, high-load tasks.
Autonomous water drone for debris capture and navigation.
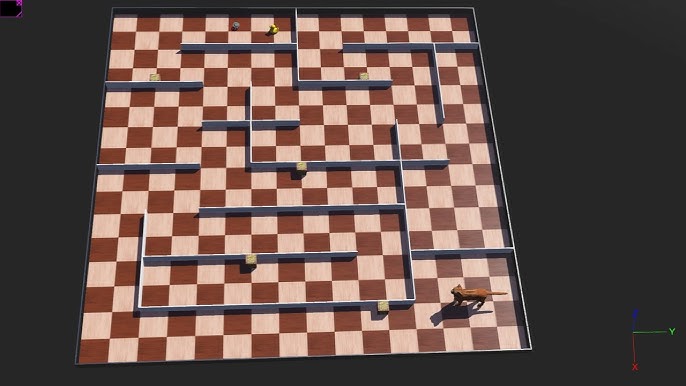
Multi-robot simulation with wall following and target detection.

Portfolio built with AI-assisted planning and rapid iteration.
Autonomous maze navigation with fast path planning.
