Project
Search and Rescue Drone
Multi-robot navigation and coordination in simulation.
Project
Multi-robot navigation and coordination in simulation.
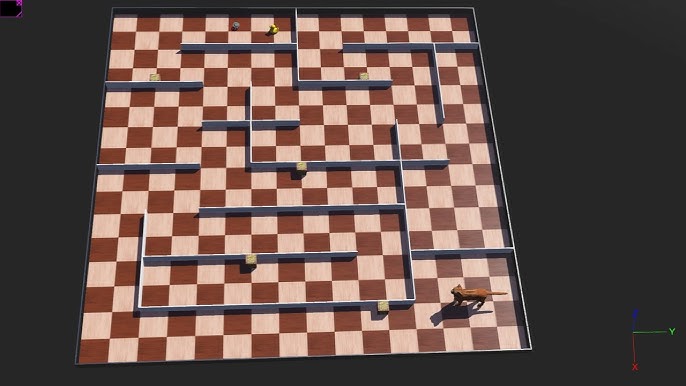
In this simulated search-and-rescue scenario, we developed two autonomous C++-powered robots to navigate a complex maze of walls, locate enclosed target zones, and coordinate their actions. Each robot maintained a precise wall-following envelope (0.2-0.5 m clearance) while continuously logging wall positions and clearance distances for post-mission analysis. Upon detecting a fully enclosed zone (walls on front, left, and right), the discovering robot broadcast a target-found message via a custom communication protocol. Both robots then halted, acknowledged the discovery, and executed a synchronized homing routine to their start point with +/-1 m accuracy. The project mimicked drone search-and-rescue missions, emphasizing robust obstacle avoidance, dynamic path replanning, and precise data logging.